MotorFish
Turn your stepper motors into precisely controlled servos
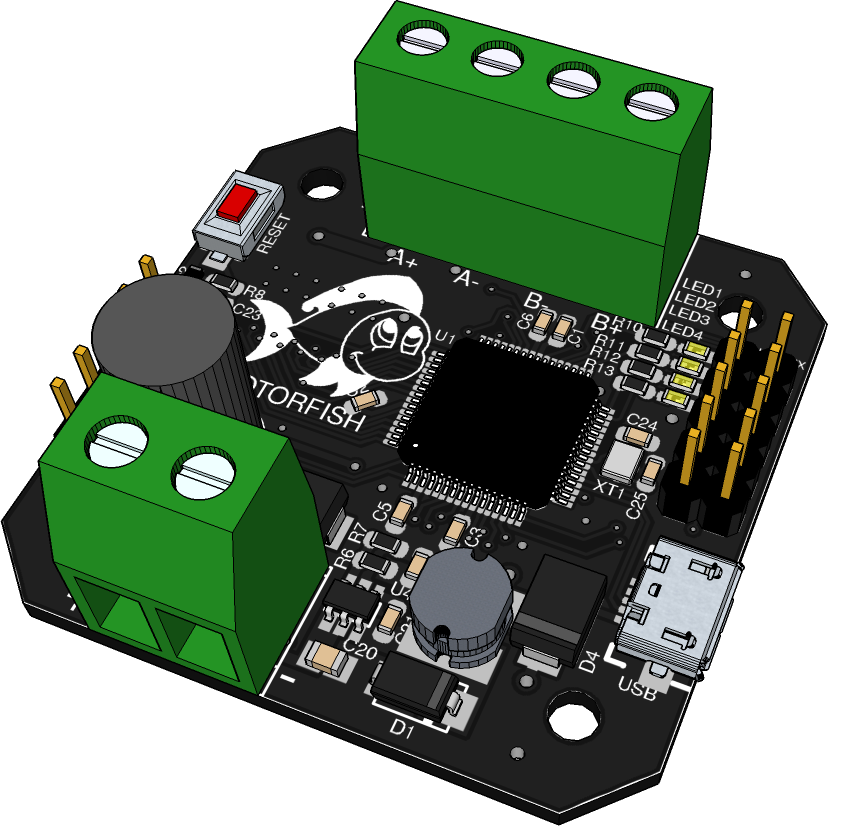
- Can drive a stepper or 2 brushed motors
- 2.5 Ampere max per phase
- Embedded 12 bit (4096 steps) magnetic encoder
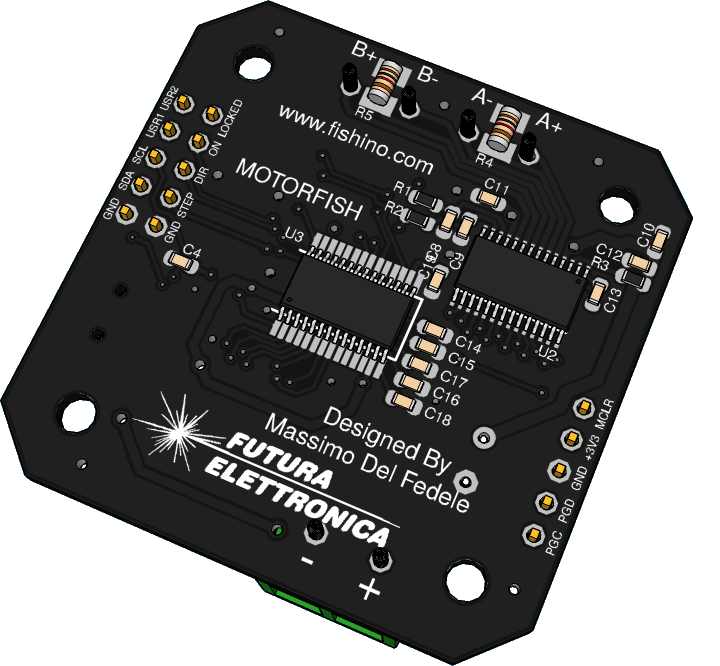
- It binds directly on motor's backside
- Nema17 format, can be mounted on bigger motors with an adapter
- Powered from 9 di 42 volt
- The on-board 32 bit microcontroller can be programmed to handle any users needs
- The onboard I2C allow easy remote control and setting
- Programmable via USB interface with the Arduino IDE or by ICSP connector with MPLAB IDE and PicKit3
- Standard step/dir stepper interface
- "locked" output to signal if required position is reached
- 4 user-programmable LEDs
- 4 user I/O, 2 of which can also be used as a standard serial port
MotorFish is an intelligent driver for one stepmotor or two brushed motors.
MotorFish is able to drive a bipolar stepper motor or 2 brushed motors with a current up to 2.5 Ampère per phase.
An autocalibration routine is able to compensate for any sensor's non-linearity or small positioning errors.
Unline standard low-cost drivers, in MotorFish all parameters are configurable via software, comprising the max motor current.
The board provides a small switching converter able to get the 3.3 Volt needed for on-board electronics directly from motor's voltage; you don't need to provide any additional low-voltage supply.
Even without software patching, the driver is able to compensate for step losses, walking up to requested position if possible.
MotorFish uses a performant 32 bit MIPS controller to handle all motor's and interface operations.
By aid of a custom bootloader you can program the controller with the well-known Arduino IDE (or our FishIDE, of course!)
The ability of MotorFish to be completely re-programmed allows to handle any kind of motor control needs ; you can use to drive a stepmotor or to precisely control the speed and direction of 2 brushed motors.
![]() Eagle files coming soon
Eagle files coming soon